
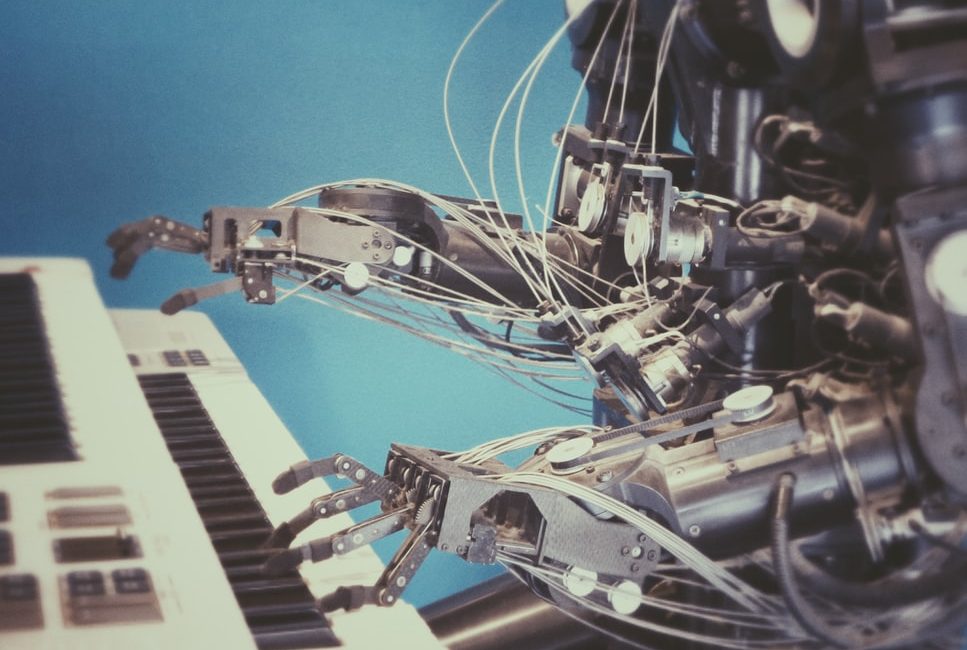

Un robot est composé de différentes pièces mécaniques, électroniques et/ou électromécaniques, le tout étant piloté, en fonction du niveau de complexité des tâches qui lui sont confiées, par un automatisme, un logiciel ou encore une intelligence artificielle.
Les différents éléments du robot
La structure mécanique
Squelette du robot, la structure mécanique doit être conçue avec une attention particulière pour les articulations qui permettent au robot de se mouvoir et de s’adapter à l’utilisation voulue.
Les capteurs
Les capteurs sensoriels du robot peuvent prendre de nombreuses formes. Cela peut être des caméras logées dans les yeux du robot, qui offrent une vision en 3D.
il existe également des scanners lasers appelés sondeurs ou encore télémètres qui permettent à l’appareil de prendre ses repères dans un environnement en trois dimensions.
Enfin, des roues codeuses peuvent équiper des robots mobiles, calculer des angles de rotation et prendre des mesures de déplacement avec précision.
Les actionneurs
On retrouve généralement sur les robots des moteurs électriques rotatifs souvent reliés à des réducteurs mécaniques à engrenages, ou des vérins, pneumatiques ou hydrauliques, qu’alimente une pompe.
Les circuits électroniques
Afin de pouvoir piloter le robot, celui-ci est doté de microprocesseurs, de microcontrôleurs, d’une mémoire de données (RAM ou EEFROM) et d’une mémoire programmable. Interagissant avec les informations que transmettent les capteurs, les servo-moteurs interviennent dans le déclenchement des séquences de logiciels ou d’instruction conduisant à exécuter des fonctions du robot ou à réaliser des actions.
La mémoire de données stocke les informations temporaires indispensables aux calculs et la mémoire programmable (OTPROM, UVPROM ou EEPROM) contient les données et les instructions du programme qui pilotent l’application qui applique le programme, qui est a priori toujours le même.
Les robots miniatures sont notamment dotés de composants de taille réduite et très peu énergivores, la capacité de leur source d’énergie embarquée étant de fait limitée.
À noter que lorsque le robot est mobile, il possède une source d’énergie embarquée telle qu’une batterie avec un accumulateur électrique (sorte de grosse pile) ou un générateur électrique relié à un moteur thermique pour les dispositifs les plus gourmands en énergie. Élément du système mécanique tel qu’une patte, un bras ou une roue motrice, l’actionneur effectue une action motrice en fonction de la liberté qui lui est laissée.